Research Projects
Usability Testing for the START2 Living Lab
Funding institution:
Duration : 01.06.2025 – 31.10.2025
Status :
Project Description:
The propose is a two-prong strategy consisting of both in-flight outdoor testing and non-flight testing, which evaluates components and systems before or after the flight tests.The in-flight and non-flight testing will be designed to best utilize the metrics, while also being as “invisible” as possible to pilots and other end users so that potential knowledge of the metrics does not subconsciously influence the outcome of the testing. To accomplish this, we will develop a small, lightweight, payload using commercial off-the shelf instrumentation that will transmit crucial flight data (speed, altitude, heading, etc.) to a ground station, where it will be recorded, together with the pilot’s and end users voice, to provide a synchronized and time-stamped data log that can be analyzed to assess the performance of each system once testing has been completed.

Adaptive Mission Planning for LIve inFrAstructures Inspection (AMPLIF-AI)
Funding institution: European Regional Development Fund (ERDF) Investment for Growth and Jobs Programme 2021-2027
Duration : 01/2024 – 12/2026
Status : Active
Project Description:
The mountainous environment of South Tyrol contains many large-scale infrastructures such as bridges, tunnels, cable cars, rock slide fences, powerlines and telecommunications towers, that require continuous monitoring to ensure their proper functionality, as well as the safety of the general public. The inspection and maintenance activities are important factors to be considered for the sustainability of the infrastructure. The aim of the AMPLIF-AI project is to improve the automated inspection carried out by unmanned systems by taking the advantage of the latest developments in machine learning, automatic control, uncrewed vehicle technologies and robotics to develop a next generation of automatic inspection systems.
AMPLIF-AI intends to create a system based on artificial intelligence that will allow inspection teams to assess in real time the condition of infrastructure in various application cases in the Alpine context. The partners will develop a system consisting of a platform ground platform and unmanned aircraft on board (UAV) supervised by the inspection team.
Digital and Robotics Analytics for Sustainable Forestry (Digiforest)
Funding institution: Horizon Europe
Duration : 01/09/2022 – 28/02/2026
Status : Active
Project Description:
The mission of Digiforest is to develop the technology needed to achieve sustainable digital forestry. The following outlines four scientific ambitions which form the basis of our project.
They include fundamental development for (1) mobile robotic navigation (multi-sensor motion estimation, 3D mission planning) and (2) data-driven semantic mapping. (3) This highly detailed data will be presented to a human supervisor, enabling him/her to make informed decisions and (4) to plan the deployment of a mobile robot harvester to selectively intervene in an environmental manner.
For more information, please visit: digiforest.eu
Forest Robotic Monitoring and Automation (FORMA)
Funding institution: European Regional Development Fund (ERDF) Investment for Growth and Jobs Programme 2021-2027
Duration : 01/01/2025 – 31/12/2027
Status : Active
Project Description:
The FORMA project will:
- Develop new methodologies for the automatic collection of data on the health status of the forest.
- Develop new hardware platforms capable of collecting such data automatically both above and below the canopy, integrating ground-based platforms and cargo drones.
- Develop new planning, perception and control algorithms to collect forest data automatically.
- Develop new algorithms that take collected data and produce distilled information that can be directly used to update the forest management plan.
- Disseminate results by contributing to international conferences and journal publications, and by organizing workshops and seminars.
- Facilitate collaboration between companies and research institutes, technology transfer and cross-fertilization through sharing the data collected on OPEN digital platforms, and making the project resources (sensors, robots) available to the territory.
Physical Cognition for Intelligent Control and Safe Human-Robot Interaction (SESTOSENSO)
Funding institution: Horizon Europe
Duration : 01/10/2022 – 30/09/2025
Status : Active
Project Description:
Sestosenso develops technologies for next generations of collaborative robots capable of self-adapting to different time-varying operational conditions and capable of safe and smooth adaptation from autonomous to interactive when human intervention is required either for collaboration or training/teaching. The project proposes a new sensing technology from the hardware and up to the cognitive perception and control levels, based on networks of embedded proximity and tactile sensors on the robot body, providing a unified proxy-tactile perception of the environment, required to control the robot actions and interactions, safely and autonomously. Within the project, the same technologies are also applied to wearable devices (like exoskeletons) to provide the user with better spatial awareness and to enforce safety in critical human-robot interactive tasks.
FirstLab will be mainly involved in Use Case 3:
Agricultural harvesting via wearable devices and collaborative mobile manipulators.

https://doi.org/10.1109/TASE.2025.3554368/mm1
Reconfigurable Collaborative Agri-Robots (Recoaro)
Funding institution: Research Südtirol/Alto Adige 2019
Duration : 01/10/2020 – 31/12/2023
Status : Completed
Project Description:
This project involves the development of Modular reconfigurable robots (MRRs). MRRs are composed of interchangeable mechatronic modules that can be rearranged to adapt a robot to operate under new circumstances, perform different tasks, or recover from damage. It is
anticipated the situations in which manually reconfigured MRRs will be deployed require the use of semi-automatic shared human-robot control. This work will involve developing a shared trajectory-tracking control system for an MRR.

https://doi.org/10.1109/TASE.2025.3582522/mm1
Automatic control and trajectory planning of unmanned aerial vehicles
Funding institution:
Duration : 01/05/2023 – 30/04/2024
Status : Completed
Project Description:
There are several applications where the use of drone cargo can reduce costs, energy consumption, and emissions while improving safety and operational efficiency. Representative sectors that can take advantage of this include telecommunications, logistics, energy, and forestry.
The aim is to make advances in control, which are critical to operational safety, as a drone and its pilot can work cooperatively across a wide range of missions. The initiative will develop a comprehensive approach by leveraging the latest advances in nonlinear control and reactive collision avoidance to improve the use of cargo drones in diverse applications.

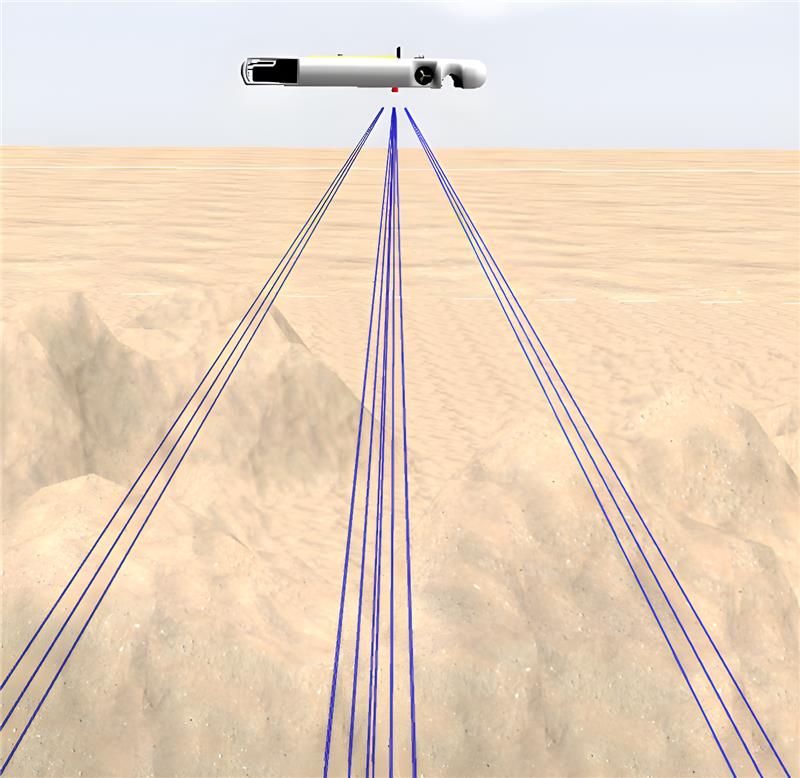
Development of higher order sliding mode observer for the acoustically-aided inertial navigation of underwater vehicles
Funding institution:
Duration : 10/2025-12/2026
Status : Completed
Project Description:
The accurate localization of underwater vehicles is critical for many applications, such as search & rescue, mapping, environmental/biological monitoring, intervention, and inspection. Compared to ground vehicles, the localization of Autonomous Underwater Vehicles (AUVs) is more challenging, given the impossibility of using Global Navigation Satellite System (GNSS) in undersea environments. The aim of the project is to design Higher Order Sliding Mode (HOSM) observers, compared to Extended Kalman Filter (EKF), for the self-localization of an AUV with acoustic positioning. Employing bearing, elevation and depth difference measurements with respect to a surface vessel, the designed observers should estimate the North and East positions and the heading of the underwater vehicle.