Forschungsprojekte
Adaptive Missionsplanung für die Inspektion von Live-Infrastrukturen (AMPLIF-AI)
Förderinstitution: Europäischer Fonds für regionale Entwicklung (EFRE) Programm für Investitionen in Wachstum und Beschäftigung 2021-2027
Laufzeit: 01/2024 – 12/2026
Status: Aktiv
Projektbeschreibung:
Die bergige Umgebung Südtirols umfasst viele groß angelegte Infrastrukturen wie Brücken, Tunnel, Seilbahnen, Steinschlagschutzzäune, Stromleitungen und Telekommunikationsmasten, die einer kontinuierlichen Überwachung bedürfen, um ihre ordnungsgemäße Funktion sowie die Sicherheit der Öffentlichkeit zu gewährleisten. Die Inspektions- und Wartungsarbeiten sind wichtige Faktoren, die für die Nachhaltigkeit der Infrastruktur zu berücksichtigen sind. Das Ziel des AMPLIF-AI-Projekts ist es, die automatisierte Inspektion durch unbemannte Systeme zu verbessern, indem die neuesten Entwicklungen in den Bereichen maschinelles Lernen, automatische Steuerung, unbemannte Fahrzeugtechnologien und Robotik genutzt werden, um eine neue Generation automatischer Inspektionssysteme zu entwickeln.
AMPLIF-AI beabsichtigt, ein auf künstlicher Intelligenz basierendes System zu schaffen, das es Inspektionsteams ermöglicht, den Zustand der Infrastruktur in verschiedenen Anwendungsfällen im alpinen Kontext in Echtzeit zu beurteilen. Die Partner werden ein System entwickeln, das aus einer Bodenplattform und unbemannten Luftfahrzeugen (UAV) besteht, die vom Inspektionsteam überwacht werden.
Digitale und robotergestützte Analytik für nachhaltige Forstwirtschaft (Digiforest)
Förderinstitution: Horizon Europe
Laufzeit: 01.09.2022 – 28.02.2026
Status: Aktiv
Projektbeschreibung:
Die Mission von Digiforest ist es, die Technologie zu entwickeln, die für eine nachhaltige digitale Forstwirtschaft erforderlich ist. Im Folgenden werden vier wissenschaftliche Ziele beschrieben, die die Grundlage unseres Projekts bilden.
Dazu gehören grundlegende Entwicklungen für (1) die Navigation mobiler Roboter (Bewegungsschätzung mit mehreren Sensoren, 3D-Einsatzplanung) und (2) datengesteuertes semantisches Mapping. (3) Diese hochdetaillierten Daten werden einem menschlichen Supervisor präsentiert, damit dieser fundierte Entscheidungen treffen und (4) den Einsatz eines mobilen Ernte-Roboters planen kann, um selektiv und umweltfreundlich einzugreifen.
Weitere Informationen finden Sie unter: digiforest.eu
Forstliche Roboterüberwachung und Automatisierung (FORMA)
Förderinstitution: Europäischer Fonds für regionale Entwicklung (EFRE) Programm „Investitionen für Wachstum und Beschäftigung“ 2021–2027
Laufzeit: 01.01.2025–31.12.2027
Status: Aktiv
Projektbeschreibung:
Das FORMA-Projekt wird:
- neue Methoden für die automatische Erfassung von Daten zum Gesundheitszustand des Waldes entwickeln.
- neue Hardware-Plattformen entwickeln, die solche Daten sowohl oberhalb als auch unterhalb des Kronendachs automatisch erfassen können und dabei bodengestützte Plattformen und Frachtdrohnen integrieren.
- neue Planungs-, Wahrnehmungs- und Steuerungsalgorithmen entwickeln, um Walddaten automatisch zu erfassen.
- neue Algorithmen entwickeln, die aus den erfassten Daten destillierte Informationen generieren, die direkt zur Aktualisierung des Waldbewirtschaftungsplans verwendet werden können.
- Verbreitung der Ergebnisse durch Beiträge zu internationalen Konferenzen und Veröffentlichungen in Fachzeitschriften sowie durch die Organisation von Workshops und Seminaren.
- Förderung der Zusammenarbeit zwischen Unternehmen und Forschungsinstituten, des Technologietransfers und des gegenseitigen Austauschs durch die gemeinsame Nutzung der auf offenen digitalen Plattformen gesammelten Daten und die Bereitstellung der Projektressourcen (Sensoren, Roboter) für das Gebiet.
Physikalische Wahrnehmung für intelligente Steuerung und sichere Mensch-Roboter-Interaktion (SESTOSENSO)
Förderinstitution: Horizon Europe
Laufzeit: 01.10.2022 – 30.09.2025
Status: Aktiv
Projektbeschreibung:
Sestosenso entwickelt Technologien für die nächste Generation kollaborativer Roboter, die sich selbst an unterschiedliche, zeitlich variierende Betriebsbedingungen anpassen können und in der Lage sind, sicher und reibungslos von autonomem zu interaktivem Betrieb überzugehen, wenn menschliches Eingreifen entweder für die Zusammenarbeit oder für Schulungs-/Lehrzwecke erforderlich ist. Das Projekt schlägt eine neue Sensortechnologie vor, die von der Hardware bis hin zur kognitiven Wahrnehmung und Steuerung reicht und auf Netzwerken eingebetteter Näherungs- und taktiler Sensoren am Robotergehäuse basiert. Diese Technologie ermöglicht eine einheitliche taktile Wahrnehmung der Umgebung, die für die sichere und autonome Steuerung der Roboteraktionen und -interaktionen erforderlich ist. Im Rahmen des Projekts werden dieselben Technologien auch auf tragbare Geräte (wie Exoskelette) angewendet, um dem Benutzer ein besseres räumliches Bewusstsein zu vermitteln und die Sicherheit bei kritischen interaktiven Aufgaben zwischen Mensch und Roboter zu erhöhen.
FirstLab wird hauptsächlich an Anwendungsfall 3 beteiligt sein:
Landwirtschaftliche Erntearbeiten mit tragbaren Geräten und kollaborativen mobilen Manipulatoren.

Rekonfigurierbare kollaborative Agrarroboter (Recoaro)
Förderinstitution: Forschung Südtirol/Alto Adige 2019
Laufzeit: 01.10.2020 – 31.12.2023
Status: Abgeschlossen
Projektbeschreibung:
Dieses Projekt befasst sich mit der Entwicklung modularer rekonfigurierbarer Roboter (MRRs). MRRs bestehen aus austauschbaren mechatronischen Modulen, die neu angeordnet werden können, um einen Roboter an neue Umstände anzupassen, verschiedene Aufgaben auszuführen oder Schäden zu beheben. Es wird
davon ausgegangen, dass in Situationen, in denen manuell rekonfigurierte MRRs eingesetzt werden, eine halbautomatische gemeinsame Mensch-Roboter-Steuerung erforderlich ist. Diese Arbeit umfasst die Entwicklung eines gemeinsamen Trajektorienverfolgungssystems für einen MRR.

Automatische Steuerung und Flugbahnplanung von unbemannten Luftfahrzeugen
Förderinstitution:
Laufzeit: 01.05.2023 – 30.04.2024
Status: Abgeschlossen
Projektbeschreibung:
Es gibt mehrere Anwendungsbereiche, in denen der Einsatz von Drohnenfracht Kosten, Energieverbrauch und Emissionen senken und gleichzeitig die Sicherheit und Betriebseffizienz verbessern kann. Zu den repräsentativen Branchen, die davon profitieren können, gehören Telekommunikation, Logistik, Energie und Forstwirtschaft.
Ziel ist es, Fortschritte in der Steuerung zu erzielen, die für die Betriebssicherheit von entscheidender Bedeutung sind, da eine Drohne und ihr Pilot bei einer Vielzahl von Missionen kooperativ zusammenarbeiten können. Die Initiative wird einen umfassenden Ansatz entwickeln, indem sie die neuesten Fortschritte in der nichtlinearen Steuerung und der reaktiven Kollisionsvermeidung nutzt, um den Einsatz von Frachtdrohnen in verschiedenen Anwendungsbereichen zu verbessern.

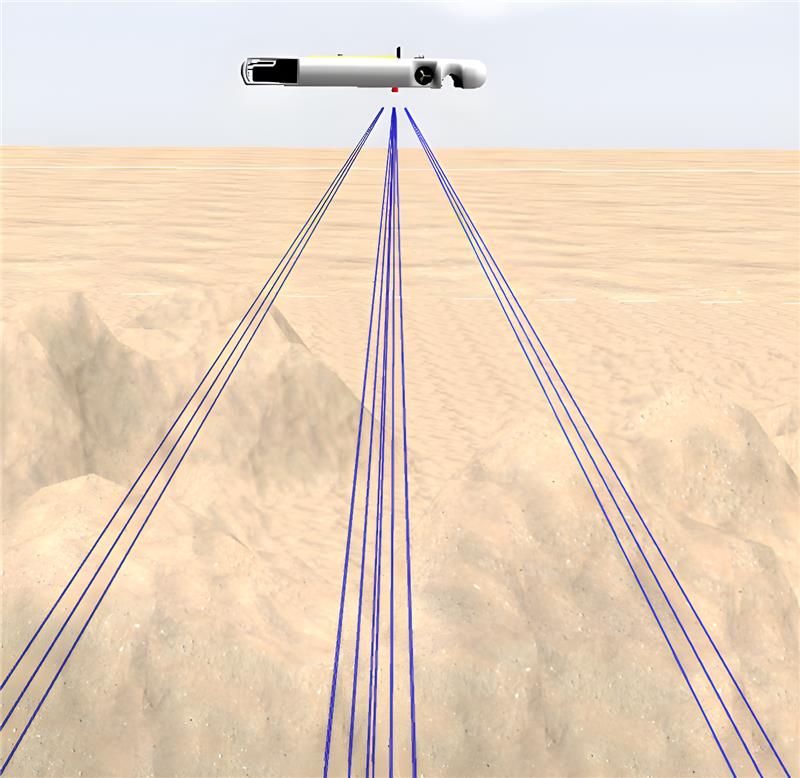
Entwicklung eines Beobachters höherer Ordnung im Gleitmodus für die akustisch unterstützte Trägheitsnavigation von Unterwasserfahrzeugen
Förderinstitution:
Laufzeit: 10/2025–12/2026
Status: Abgeschlossen
Projektbeschreibung:
Die genaue Lokalisierung von Unterwasserfahrzeugen ist für viele Anwendungen von entscheidender Bedeutung, beispielsweise für Such- und Rettungsaktionen, Kartierung, Umwelt-/Biomonitoring, Interventionen und Inspektionen. Im Vergleich zu Landfahrzeugen ist die Lokalisierung von autonomen Unterwasserfahrzeugen (AUVs) schwieriger, da die Verwendung des Global Navigation Satellite System (GNSS) in Unterwasserumgebungen nicht möglich ist. Ziel des Projekts ist es, im Vergleich zum erweiterten Kalman-Filter (EKF) Beobachter höherer Ordnung (HOSM) für die Selbstlokalisierung eines AUV mit akustischer Positionierung zu entwickeln. Unter Verwendung von Peilungs-, Höhen- und Tiefendifferenzmessungen in Bezug auf ein Oberflächenfahrzeug sollen die entwickelten Beobachter die Nord- und Ostposition sowie den Kurs des Unterwasserfahrzeugs schätzen.