Progetti di ricerca
Pianificazione adattiva delle missioni per l’ispezione delle infrastrutture in servizio (AMPLIF-AI)
Istituzione finanziatrice: Fondo europeo di sviluppo regionale (FESR) Programma Investimenti per la crescita e l’occupazione 2021-2027
Durata: 01/2024 – 12/2026
Stato: Attivo
Descrizione del progetto:
L’ambiente montuoso dell’Alto Adige ospita numerose infrastrutture su larga scala quali ponti, gallerie, funivie, barriere paramassi, linee elettriche e torri di telecomunicazione, che richiedono un monitoraggio continuo per garantirne il corretto funzionamento e la sicurezza della popolazione. Le attività di ispezione e manutenzione sono fattori importanti da considerare per la sostenibilità delle infrastrutture. L’obiettivo del progetto AMPLIF-AI è migliorare l’ispezione automatizzata effettuata da sistemi senza pilota, sfruttando gli ultimi sviluppi nel campo dell’apprendimento automatico, del controllo automatico, delle tecnologie dei veicoli senza equipaggio e della robotica per sviluppare una nuova generazione di sistemi di ispezione automatica.
AMPLIF-AI intende creare un sistema basato sull’intelligenza artificiale che consentirà ai team di ispezione di valutare in tempo reale le condizioni delle infrastrutture in vari casi di applicazione nel contesto alpino. I partner svilupperanno un sistema composto da una piattaforma a terra e da velivoli senza pilota (UAV) supervisionati dal team di ispezione.
Analisi digitale e robotica per una silvicoltura sostenibile (Digiforest)
Istituzione finanziatrice: Horizon Europe
Durata: 01/09/2022 – 28/02/2026
Stato: Attivo
Descrizione del progetto:
La missione di Digiforest è sviluppare la tecnologia necessaria per realizzare una silvicoltura digitale sostenibile. Di seguito sono illustrate quattro ambizioni scientifiche che costituiscono la base del nostro progetto.
Esse includono lo sviluppo fondamentale per (1) la navigazione robotica mobile (stima del movimento multisensoriale, pianificazione della missione 3D) e (2) la mappatura semantica basata sui dati. (3) Questi dati altamente dettagliati saranno presentati a un supervisore umano, consentendogli di prendere decisioni informate e (4) di pianificare l’impiego di un robot mobile per la raccolta, in modo da intervenire in modo selettivo e rispettoso dell’ambiente.
Per ulteriori informazioni, visitare il sito: digiforest.eu
Monitoraggio robotico e automazione delle foreste (FORMA)
Istituzione finanziatrice: Fondo europeo di sviluppo regionale (FESR) Programma Investimenti per la crescita e l’occupazione 2021-2027
Durata: 01/01/2025 – 31/12/2027
Stato: Attivo
Descrizione del progetto:
Il progetto FORMA:
- Svilupperà nuove metodologie per la raccolta automatica di dati sullo stato di salute delle foreste.
- Svilupperà nuove piattaforme hardware in grado di raccogliere automaticamente tali dati sia sopra che sotto la chioma, integrando piattaforme terrestri e droni da carico.
- Svilupperà nuovi algoritmi di pianificazione, percezione e controllo per raccogliere automaticamente i dati forestali.
- Svilupperà nuovi algoritmi che utilizzano i dati raccolti e producono informazioni sintetiche che possono essere utilizzate direttamente per aggiornare il piano di gestione forestale.
- Diffonderà i risultati contribuendo a conferenze internazionali e pubblicazioni su riviste scientifiche e organizzando workshop e seminari.
- Facilitarà la collaborazione tra aziende e istituti di ricerca, il trasferimento tecnologico e la fertilizzazione incrociata attraverso la condivisione dei dati raccolti su piattaforme digitali OPEN e mettendo a disposizione del territorio le risorse del progetto (sensori, robot).
Cognizione fisica per il controllo intelligente e l’interazione sicura tra uomo e robot (SESTOSENSO)
Istituzione finanziatrice: Horizon Europe
Durata: 01/10/2022 – 30/09/2025
Stato: Attivo
Descrizione del progetto:
Sestosenso sviluppa tecnologie per la prossima generazione di robot collaborativi in grado di adattarsi autonomamente a diverse condizioni operative che variano nel tempo e di passare in modo sicuro e fluido dalla modalità autonoma a quella interattiva quando è necessario l’intervento umano per la collaborazione o la formazione/l’insegnamento. Il progetto propone una nuova tecnologia di rilevamento che va dall’hardware fino ai livelli di percezione cognitiva e controllo, basata su reti di sensori di prossimità e tattili integrati nel corpo del robot, fornendo una percezione tattile proxy unificata dell’ambiente, necessaria per controllare le azioni e le interazioni del robot in modo sicuro e autonomo. Nell’ambito del progetto, le stesse tecnologie vengono applicate anche a dispositivi indossabili (come gli esoscheletri) per fornire all’utente una migliore consapevolezza spaziale e garantire la sicurezza in compiti critici di interazione uomo-robot.
FirstLab sarà coinvolto principalmente nel caso d’uso 3:
Raccolta agricola tramite dispositivi indossabili e manipolatori mobili collaborativi.

Robot agricoli collaborativi riconfigurabili (Recoaro)
Istituzione finanziatrice: Research Südtirol/Alto Adige 2019
Durata: 01/10/2020 – 31/12/2023
Stato: Chiuso
Descrizione del progetto:
Questo progetto prevede lo sviluppo di robot modulari riconfigurabili (MRR). Gli MRR sono composti da moduli meccatronici intercambiabili che possono essere riorganizzati per adattare un robot al funzionamento in nuove circostanze, all’esecuzione di compiti diversi o al ripristino da danni. Si
prevede che le situazioni in cui verranno impiegati MRR riconfigurati manualmente richiederanno l’uso di un controllo semiautomatico condiviso uomo-robot. Questo lavoro comporterà lo sviluppo di un sistema di controllo condiviso per il tracciamento della traiettoria per un MRR.

Controllo automatico e pianificazione della traiettoria dei veicoli aerei senza pilota
Istituzione finanziatrice:
Durata: 01/05/2023 – 30/04/2024
Stato: Chiuso
Descrizione del progetto:
Esistono diverse applicazioni in cui l’uso di droni cargo può ridurre i costi, il consumo energetico e le emissioni, migliorando al contempo la sicurezza e l’efficienza operativa. I settori rappresentativi che possono trarne vantaggio includono le telecomunicazioni, la logistica, l’energia e la silvicoltura.
L’obiettivo è quello di compiere progressi nel controllo, fondamentale per la sicurezza operativa, poiché un drone e il suo pilota possono lavorare in modo cooperativo in un’ampia gamma di missioni. L’iniziativa svilupperà un approccio globale sfruttando gli ultimi progressi nel controllo non lineare e nella prevenzione reattiva delle collisioni per migliorare l’uso dei droni cargo in diverse applicazioni.

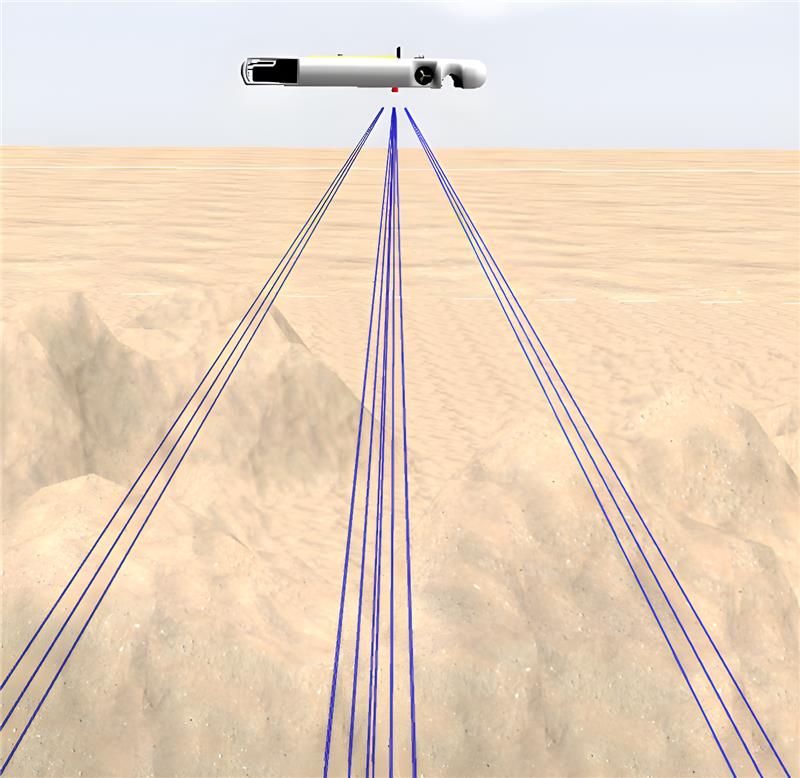
Sviluppo di un osservatore in modalità di scorrimento di ordine superiore per la navigazione inerziale assistita acusticamente dei veicoli subacquei
Istituzione finanziatrice:
Durata: 10/2025-12/2026
Stato: Chiuso
Descrizione del progetto:
La localizzazione accurata dei veicoli subacquei è fondamentale per molte applicazioni, quali ricerca e soccorso, mappatura, monitoraggio ambientale/biologico, intervento e ispezione. Rispetto ai veicoli terrestri, la localizzazione dei veicoli subacquei autonomi (AUV) è più complessa, data l’impossibilità di utilizzare il sistema globale di navigazione satellitare (GNSS) in ambienti sottomarini. L’obiettivo del progetto è quello di progettare osservatori di modo scorrevole di ordine superiore (HOSM), rispetto al filtro di Kalman esteso (EKF), per l’autolocalizzazione di un AUV con posizionamento acustico. Utilizzando misurazioni di direzione, elevazione e differenza di profondità rispetto a un’imbarcazione di superficie, gli osservatori progettati dovrebbero stimare le posizioni nord e est e la direzione del veicolo subacqueo.