Progetti degli studenti
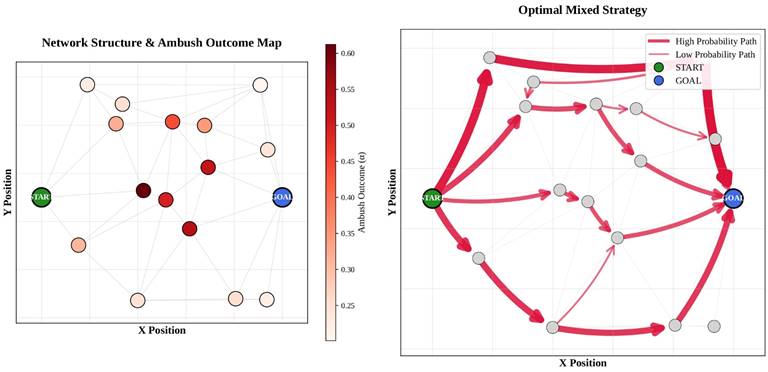
Pianificazione della traiettoria per veicoli terrestri senza equipaggio Navigazione nascosta in ambienti contesi, sovvenzione DM352 concessa da Iveco Defence Vehicles
Nome dello studente: Ivan Enzo Gargano (PhD)
Anno: 2022-2023, 38th cycle ASE PhD
Motivazione/Contesto Approccio:
- Sviluppo di un quadro di pianificazione della traiettoria ibrida (HTPF) che consente una collaborazione senza soluzione di continuità tra uomo e robot attraverso l’evitamento intelligente dei pericoli e l’esecuzione adattiva delle missioni.
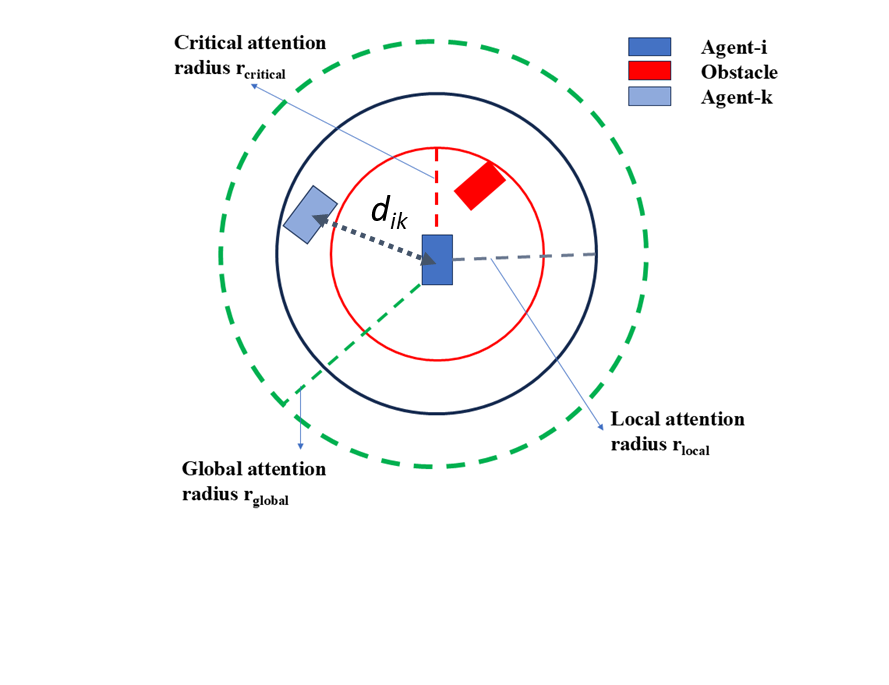
Ottimizzazione della traiettoria di più robot utilizzando dinamiche di opinione
Nome dello studente: B Sai Bhaskar Varma (PhD)
Anno: 2023-2026
Motivazione/Contesto Approccio:
- Modellare l’interazione/influenza tra la decisione di un agente e quella degli altri, che è difficile ma cruciale nel processo decisionale.
- Formulare una legge di controllo decentralizzata per l’ottimizzazione della traiettoria dei sistemi multiagente (MAS) in un ambiente incerto/dinamico, utilizzando un feedback cooperativo.
- Il processo decisionale collettivo è fondamentale nei sistemi multirobot (MRS) per evitare blocchi e collisioni.
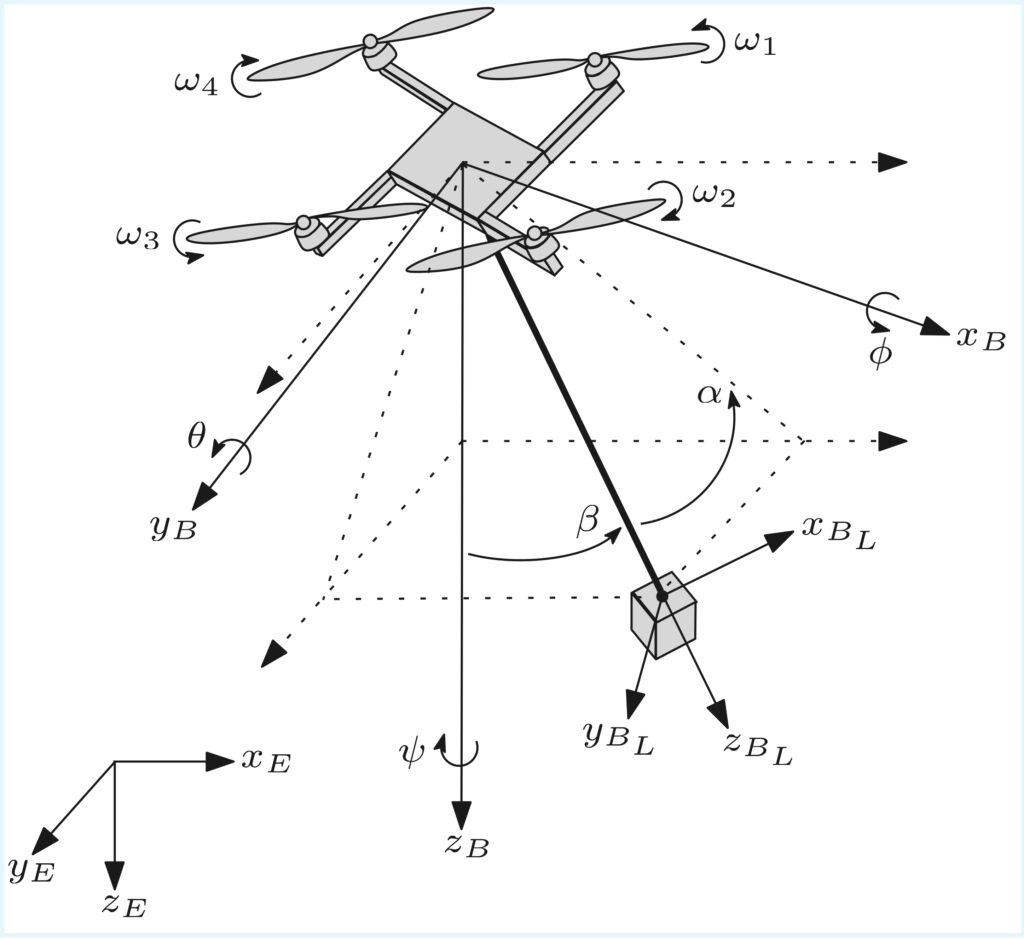
Controllo robusto e sicuro dei droni per il trasporto aereo di merci
Nome dello studente: Sara Gomiero (PhD)
Anno: 2023-2026
Motivazione/Contesto Approccio:
- I droni con carichi utili sospesi a cavo stanno rivoluzionando i settori sociali ed economici, in particolare quello dei trasporti e delle consegne
- I quadricotteri da carico sono fortemente sottoazionati e soggetti sia a disturbi esterni che a oscillazioni del carico
- I droni commerciali sono solitamente dotati di controllori PID, ma per l’integrazione sicura dei quadricotteri da carico nell’ambiente sono necessari controllori robusti.
- Per risolvere il problema del tracciamento della traiettoria vengono studiati controllori robusti basati su tecniche di modalità scorrevole e adattive.
- Gli osservatori robusti sono progettati per stimare i disturbi e gli stati del drone da carico.
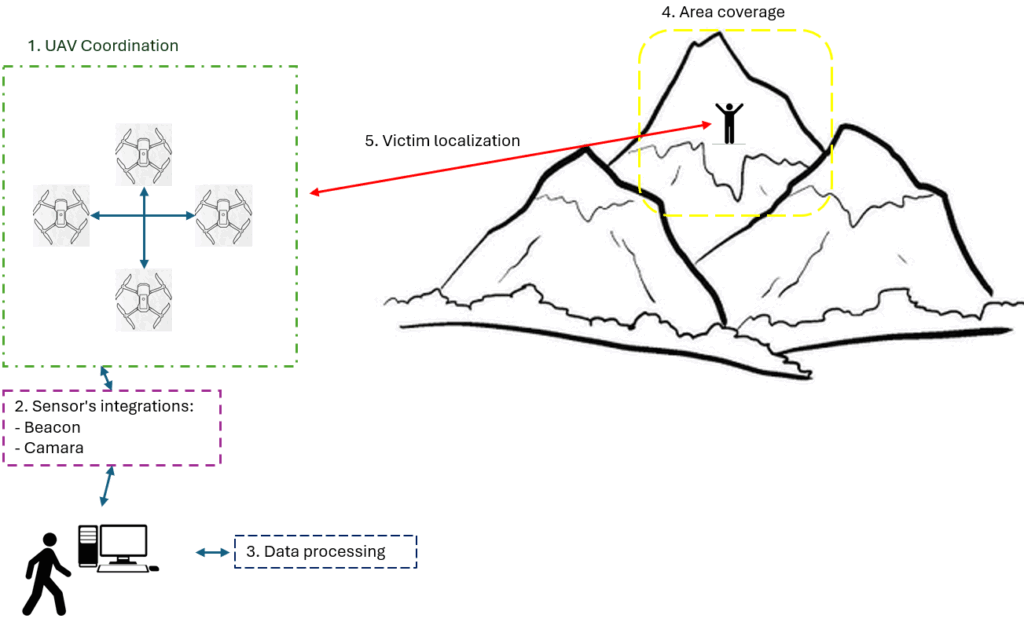
Sistema di rilevamento basato su più UAV per le vittime di valanghe
Nome dello studente: Joel Enrique Esparza Ramirez (PhD)
Anno: 2024-2027
Motivazione/Contesto Approccio:
La ricerca propone un sistema basato su più UAV progettato per accelerare la localizzazione delle vittime di valanghe integrando tecnologie di rilevamento avanzate e strategie di coordinamento autonome. Ciascun UAV è dotato di sensori quali ricevitori ARVA e telecamere ottiche, che consentono il rilevamento in tempo reale e la conferma visiva delle persone sepolte. Il sistema impiega algoritmi di traiettoria di volo adattivi e un’elaborazione intelligente dei dati per regolare dinamicamente i modelli di ricerca in base al feedback ambientale, garantendo una copertura efficiente dell’area e riducendo al minimo la ridondanza. Attraverso simulazioni e test sul campo, la metodologia mira a convalidare le prestazioni del sistema in termini di accuratezza di rilevamento, robustezza operativa ed efficienza temporale.
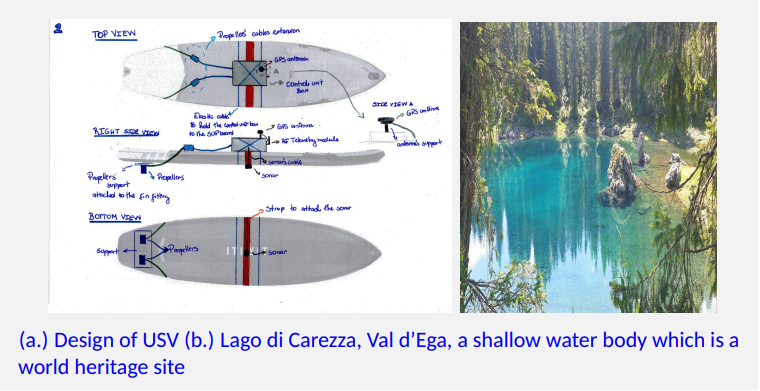
Imbarcazione di superficie senza equipaggio per il rilevamento di acque interne poco profonde
Nome dello studente: Fernanda Dalla Vecchia Gueter (Master)
Anno: 2019-2020
Motivazione/Contesto Approccio:
- Carenza idrica e perdita di biodiversità acquatica dovute al rapido cambiamento delle condizioni meteorologiche e al riscaldamento globale.
- Progettare un veicolo di superficie senza equipaggio per effettuare un rilevamento della profondità dell’acqua e colmare questa lacuna.
- Imbarcazione economica, leggera, facile da trasportare e assemblare, ma dotata delle caratteristiche necessarie.
- Il corpo dell’imbarcazione è costituito da una tavola da waterboard.
Sviluppo e collaudo di un sistema meccatronico e di un controllore basato su ROS per un UGV fuoristrada cingolato
Nome dello studente: Galli Davide (Master)
Anno: 2022-2023
Motivazione/Contesto Approccio:
L’agroforestazione 3.0 si affida sempre più ai robot per svolgere compiti ripetitivi, poiché questi ultimi sono in grado di superare i limiti umani.
L’obiettivo è quello di sviluppare da zero l’interfaccia tra il Mattro ROVO 2, una piattaforma mobile radiocomandata, e l’Nvida Jetson TX2, una piattaforma di sviluppo ampiamente utilizzata, per ottenere un sistema in grado di muoversi in modo autonomo sulla base di alcuni input.

Sviluppo di un algoritmo di pianificazione del percorso per un robot di rifilatura
Nome dello studente: Manzardo Matteo (Master)
Anno: 2022-2023
Motivazione/Contesto Approccio:
Attualmente, l’operazione di potatura di un cespuglio viene eseguita manualmente da operatori esperti. L’obiettivo del progetto è automatizzare questa operazione sfruttando un manipolatore robotico. In particolare, in questo progetto è stato sviluppato un metodo che genera automaticamente un percorso in grado di tagliare il cespuglio nel minor tempo possibile ed eseguendo un taglio efficace (preciso e completo, ovvero ogni parte del cespuglio viene potata).
