Studentenprojekte
Trajektorienplanung für unbemannte Bodenfahrzeuge Verdeckte Navigation in umkämpften Umgebungen, DM352-Förderung von Iveco Defence Vehicles
Name des Studenten: Ivan Enzo Gargano (PhD)
Jahr: 2022-2023, 38th cycle ASE PhD
Motivation/Hintergrund Ansatz:
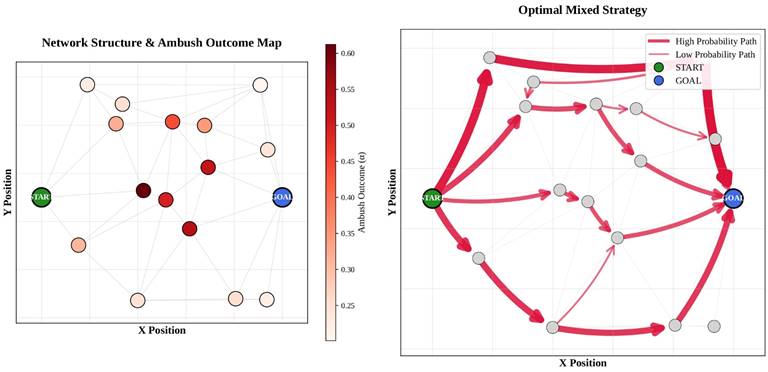
Entwicklung eines hybriden Trajektorienplanungsrahmens (HTPF), der eine nahtlose Zusammenarbeit zwischen Mensch und Roboter durch intelligente Gefahrenvermeidung und adaptive Missionsausführung ermöglicht.
Multi-Roboter-Trajektorienoptimierung unter Verwendung von Meinungsdynamik
Name des Studenten: B Sai Bhaskar Varma (PhD)
Jahr: 2023–2026
Motivation/Hintergrund Ansatz:
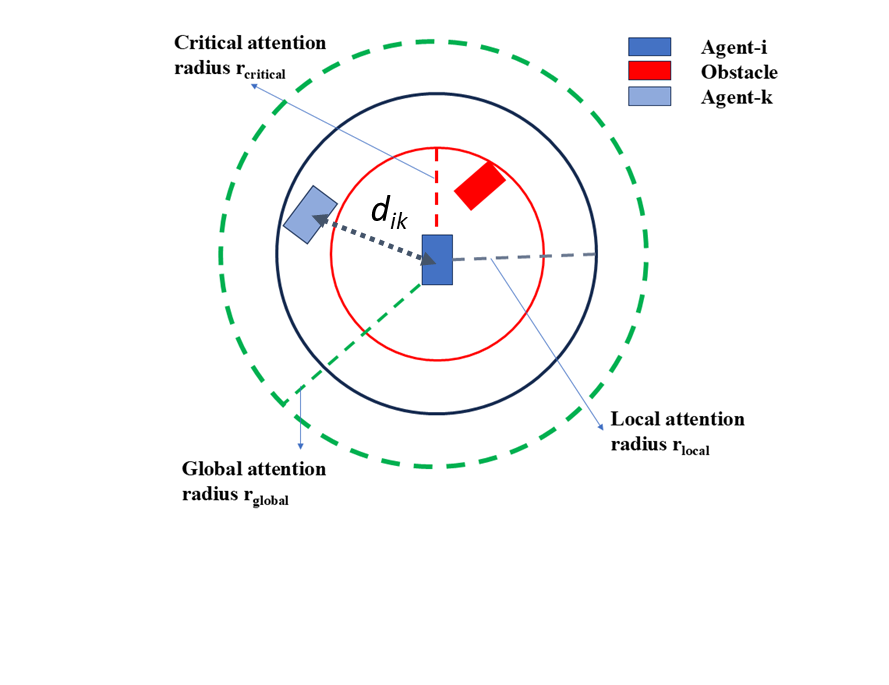
- Modellierung der Wechselwirkung/des Einflusses zwischen der Entscheidung eines Agenten auf andere, was eine Herausforderung darstellt, aber für die Entscheidungsfindung von entscheidender Bedeutung ist.
- Formulierung eines dezentralen Steuerungsgesetzes für die Trajektorienoptimierung von Multiagentensystemen (MAS) in einer unsicheren/dynamischen Umgebung unter Verwendung kooperativer Rückkopplung.
- Kollektive Entscheidungsfindung ist in Multirobotersystemen (MRS) entscheidend, um Deadlocks und Kollisionen zu vermeiden.
Robuste und sichere Steuerung von Luftfrachtdrohnen
Name der Studentin: Sara Gomiero (PhD)
Jahr: 2023–2026
Motivation/Hintergrund Ansatz:
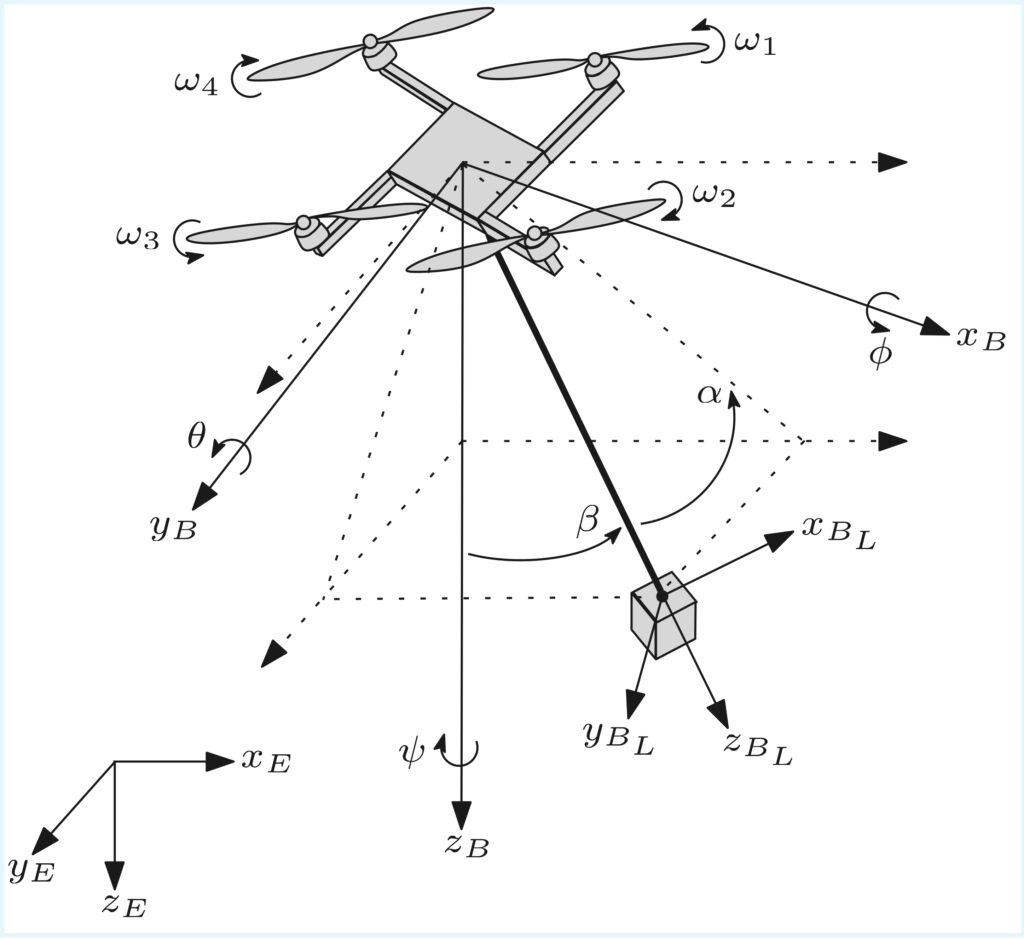
- Robuste Beobachter werden entwickelt, um die Störungen und Zustände der Frachtdrohne zu schätzen.
- Drohnen mit kabelgebundenen Nutzlasten revolutionieren soziale und wirtschaftliche Bereiche, insbesondere den Transport- und Lieferverkehr.
- Frachtquadrocopter sind stark untersteuerbar und unterliegen sowohl externen Störungen als auch Lastschwingungen.
- Kommerzielle Drohnen sind in der Regel mit PID-Reglern ausgestattet, aber für den sicheren Einsatz von Fracht-Quadrotoren in der Umgebung sind robuste Regler erforderlich.
- Zur Lösung des Problems der Bahnverfolgung werden robuste Regler auf Basis von Sliding-Mode- und adaptiven Techniken untersucht.
Multi-UAV-basiertes System zur Ortung von Lawinenopfern
Name des Studenten: Joel Enrique Esparza Ramirez (PhD)
Jahr: 2024-2027
Motivation/Hintergrundansatz:
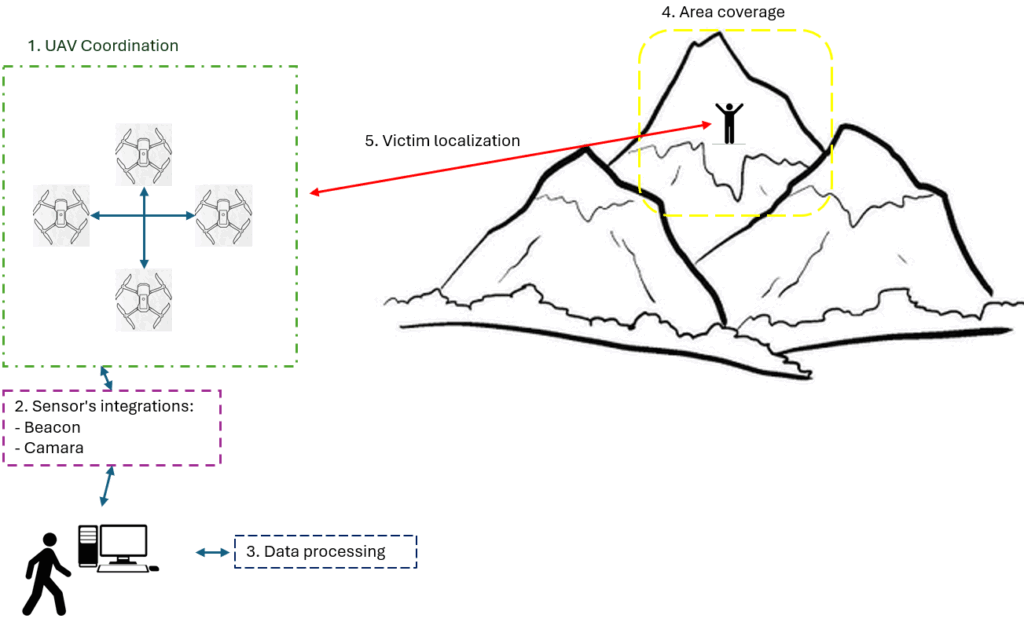
Die Forschung schlägt ein auf mehreren UAVs basierendes System vor, das die Lokalisierung von Lawinenopfern durch die Integration fortschrittlicher Erkennungstechnologien und autonomer Koordinationsstrategien beschleunigen soll. Jedes UAV ist mit Sensoren wie ARVA-Empfängern und optischen Kameras ausgestattet, die eine Echtzeit-Erkennung und visuelle Bestätigung von verschütteten Personen ermöglichen. Das System verwendet adaptive Flugbahnalgorithmen und intelligente Datenverarbeitung, um Suchmuster auf der Grundlage von Rückmeldungen aus der Umgebung dynamisch anzupassen, wodurch eine effiziente Abdeckung des Gebiets gewährleistet und Redundanzen minimiert werden. Durch Simulationen und Feldtests soll die Methodik die Leistung des Systems in Bezug auf Erkennungsgenauigkeit, Betriebsrobustheit und Zeiteffizienz validieren.
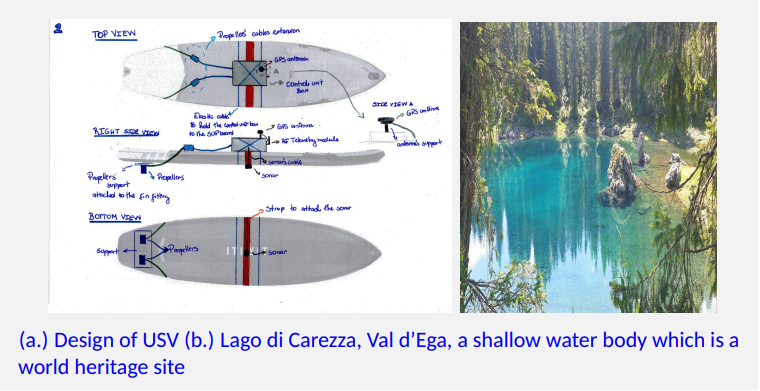
Unbemanntes Oberflächenfahrzeug zur Vermessung flacher Binnengewässer
Name der Studentin: Fernanda Dalla Vecchia Gueter (Master)
Jahr: 2019-2020
Motivation/Hintergrund Ansatz:
- Wasserknappheit aufgrund von sich schnell ändernden Wetterbedingungen und globaler Erwärmung sowie Verlust der aquatischen Artenvielfalt.
- Entwurf eines unbemannten Oberflächenfahrzeugs zur Vermessung der Wassertiefe, um diese Lücke zu schließen.
- Kostengünstiges, leichtes und einfach zu transportierendes und zu montierendes Fahrzeug, das dennoch über die erforderlichen Eigenschaften verfügt.
- Ein Stand-up-Wasserboard bildet den Rumpf des Fahrzeugs.
Entwicklung und Erprobung eines mechatronischen Systems und einer ROS-basierten Steuerung für ein geländegängiges UGV mit Raupenantrieb
Name des Studenten: Galli Davide (Master)
Jahr: 2022-2023
Motivation/Hintergrund Ansatz:
Agroforestry 3.0 setzt zunehmend auf Roboter, um repetitive Aufgaben zu übernehmen, da Roboter in der Lage sind, kritische menschliche Einschränkungen zu überwinden.
Das Ziel ist es, die Schnittstelle zwischen dem Mattro ROVO 2, einer funkgesteuerten mobilen Plattform, und dem Nvida Jetson TX2, einer weit verbreiteten Entwicklungsplattform, von Grund auf neu zu entwickeln, um ein System zu erhalten, das in der Lage ist, bei bestimmten Eingaben autonom zu fahren.

Entwicklung eines Wegplanungsalgorithmus für einen Trimmroboter
Name des Studenten: Manzardo Matteo (Master)
Jahr: 2022-2023
Motivation/Hintergrund Ansatz:
Heutzutage wird das Trimmen eines kunstvollen Strauchs manuell von erfahrenen Fachkräften durchgeführt. Das Ziel des Projekts ist es, diesen Vorgang mithilfe eines Robotermanipulators zu automatisieren. Insbesondere wurde in diesem Projekt eine Methode entwickelt, die automatisch einen Weg generiert, mit dem der Strauch in kürzester Zeit und durch einen effektiven Schnitt (präzise und vollständig, d. h. jeder Teil des Strauchs wird getrimmt) geschnitten werden kann.
