Robot e attrezzature


Il laboratorio è dotato di sistemi robotici all’avanguardia, sensori per la percezione e la mappatura dell’ambiente esterno, nonché sistemi meccatronici e integrati per lo sviluppo di attività di ricerca applicata e prototipi.
Piattaforme mobili


Descrizione del dispositivo:

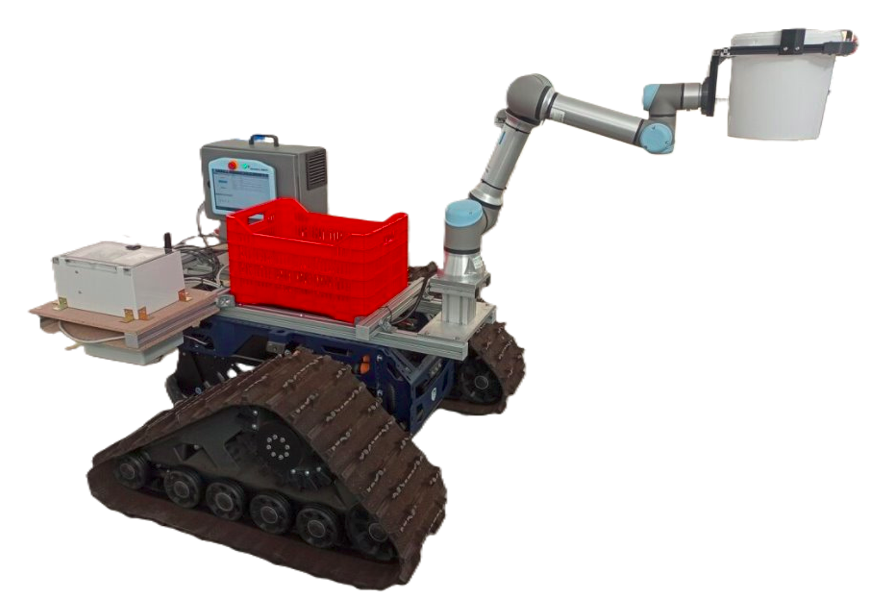
Husky è una piattaforma di sviluppo robotico di medie dimensioni. Ha una grande capacità di carico utile e una trasmissione ad alta coppia.
Specifiche tecniche:
| Dimensioni (esterne) | 990 x 670 x 390 mm |
| Dimensioni (interne) | 296 x 411 x 155 mm |
| Peso proprio | 50 kg |
| Carico massimo | 75 kg |
| Driver e API | ROS, C++ Library, MathWorks |
Applicazioni in laboratorio:
Viene utilizzata come piattaforma multiuso per lo sviluppo di applicazioni robotiche sul campo e per applicazioni di ricerca applicata, ad esempio percezione, rilevamento prossimale, prelievo, manipolazione e così via.

Manipolatori robotici
Descrizione del dispositivo:

L’UR3e è il robot collaborativo di piccole dimensioni della famiglia Universal Robots. È ideale per automatizzare operazioni di assemblaggio leggere e scenari in cui il carico utile non è elevato (3 kg di carico utile nonostante un peso di soli 11 kg) grazie alla rotazione di ±360 gradi su tutti i giunti del polso e alla rotazione infinita sul giunto terminale.
Specifiche tecniche:
| Gradi di libertà | 6 giunti rotanti |
| Carico utile | 3 kg / 6.6 lbs |
| Ripetibilità | ±0,03 mm, con carico utile, secondo ISO 9283 |
| Peso | 11 kg / 24.3 lbs |
| Raggiungere | 500 mm / 19.7 in |
| Ambito di movimento | Base: ± 360°, Spalla: ± 360°, Gomito: ± 360°,
Polso 1: ± 360°, Polso 2: ± 360°, Polso 3: Infinito |
| Velocità massima | Base: ± 180°/sec, Spalla: ± 180°/sec,
Gomito: ± 180°/sec, Polso 1: ± 360°/sec, Polso 2: ± 360°/sec, Polso 3: ± 360°/sec |
Applicazioni in laboratorio:
Viene utilizzato per consentire alle piattaforme robotiche mobili di afferrare e spostare oggetti nell’ambiente di lavoro, nonché per testare applicazioni di movimentazione e manipolazione basate sulla visione.
Descrizione del dispositivo:
L’UR5e è il modello di medie dimensioni della famiglia Universal Robots. È ideale per automatizzare attività di lavorazione con carichi leggeri grazie alla sua portata di 5 kg e al raggio d’azione di 850 mm.
Specifiche tecniche:
| Gradi di libertà | 6 rotating joints |
| Carico utile | 5 kg / 11 lbs |
| Ripetibilità | ±0,03 mm, con carico utile, secondo ISO 9283 |
| Peso con cavo | 20.6 kg / 45.4 lbs |
| Raggiungere | 850 mm / 33.5 in |
| Ambito di movimento | Base: ± 360°, Spalla: ± 360°, Gomito: ± 360°,
Polso 1: ± 360°, Polso 2: ± 360°, Polso 3: Infinito |
| Velocità massima | Base: ± 180°/sec, Spalla: ± 180°/sec,
Gomito: ± 180°/sec, Polso 1: ± 360°/sec, Polso 2: ± 360°/sec, Polso 3: ± 360°/sec |
Applicazioni in laboratorio:
Viene utilizzato per consentire alle piattaforme robotiche mobili di afferrare e spostare oggetti nell’ambiente di lavoro.
Controllori
Descrizione del dispositivo:

Il joystick Brunner CLS-E Active Force Feedback trova applicazione perfetta in contesti in cui viene utilizzata una soluzione stick moderna per il controllo del sistema. Offre qualità eccellente, massima fedeltà e durata unica, con un rapporto qualità-prezzo senza pari.
Technical specifications:
| Assistenza | X-Plane, FSX, FSX Steam edition, Prepare-3D with Brunner CLS2SIM SW, X-Plane Plugin for Windows, Linux |
| Brunner Drop-In: | Completamente integrato, con unità di controllo incorporata e ingresso alimentazione 36 V CC (alimentatore esterno incluso) |
| Motori | Tecnologia brushless DC a lunga durata |
| Tecnologia di feedback | Feedback di posizione ad alta risoluzione senza contatto |
| Raffreddamento | Raffreddamento passivo senza ventola, quindi molto silenzioso ed efficiente |
| Gradi di libertà | 2 |
Applicazioni in laboratorio:
Insieme alle piattaforme robotiche mobili, viene utilizzato per il controllo remoto di applicazioni robotiche sul campo.
Descrizione del dispositivo:

Jetson TX2 è il dispositivo di elaborazione AI integrato più veloce ed efficiente dal punto di vista energetico. Questo supercomputer su modulo offre una vera elaborazione AI all’avanguardia. È basato su una GPU della famiglia NVIDIA Pascal™ e dispone di una varietà di interfacce hardware standard che ne facilitano l’integrazione in un’ampia gamma di prodotti e fattori di forma.
Specifiche tecniche:
| GPU | 256-core NVIDIA Pascal™ GPU architecture with 256 NVIDIA CUDA cores |
| CPU | Dual-Core NVIDIA Denver 2 64-Bit CPU Quad-Core ARM® Cortex®-A57 MPCore |
| RAM | 8GB 128-bit LPDDR4 Memory 1866 MHx – 59.7 GB/s |
| Stoccaggio | 32GB eMMC 5.1 |
| Potenza | 7.5 W |
| Wi-fi | Yes |
Applicazioni in laboratorio:
Viene utilizzato come centro di calcolo e controller per applicazioni robotiche e applicazioni di ricerca applicata.
Produzione e prototipazione


Sensori



Sistemi di visione


Prototipi di veicoli terrestri senza equipaggio
