Robots and Equipment


Mobile Platforms


Description of the device:

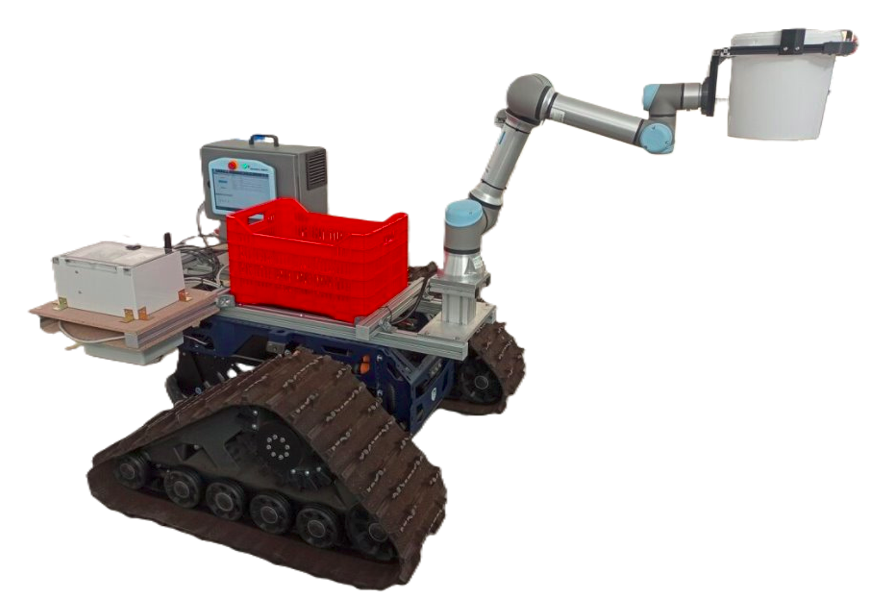
Husky is a medium sized robotic development platform. It has a large payload capacity and an high-torque drive-train.
Technical specifications:
| Dimensions (External) | 990 x 670 x 390 mm |
| Dimensions (Internal) | 296 x 411 x 155 mm |
| Own Weight | 50 kg |
| Max Payload | 75 kg |
| Drivers and APIs | ROS, C++ Library, MathWorks |
Applications in the laboratory:
It is used as a multipurpose platform for the development of field robotic applications as well as applied research applications, e.g. perception, proximal sensing, picking, manipulation and so on.

Robotic Manipulators
Description of the device:

The UR3e is the small-sized collaborative robot of the Universal Robots family. It is ideal for automating light assembly tasks and scenarios where the payload is not demanding (3 kg payload despite only 11kg of weight) thanks to ±360-degree rotation on all wrist joints, and infinite rotation on the end joint.
Technical specifications:
| Degrees of freedom | 6 rotating joints |
| Payload | 3 kg / 6.6 lbs |
| Repeatability | ±0.03 mm, with payload, per ISO 9283 |
| Weight | 11 kg / 24.3 lbs |
| Reach | 500 mm / 19.7 in |
| Motion Range | Base: ± 360°, Shoulder: ± 360°, Elbow: ± 360°,
Wrist 1: ± 360°, Wrist 2: ± 360°, Wrist 3: Infinite |
| Maximum Speed | Base: ± 180°/Sec, Shoulder: ± 180°/Sec,
Elbow: ± 180°/Sec, Wrist 1: ± 360°/Sec, Wrist 2: ± 360°/Sec, Wrist 3: ± 360°/Sec |
Applications in the laboratory:
It is used to give the mobile robotic platforms the possibility to grasp and move objects in the working environment as well as to test vision-based handling and manipulating applications
Description of the device:
The UR5e is the medium-sized member of the Universal Robots family. It is ideal for automating low-weight processing tasks thanks to its 5 kg payload and 850 mm reach radius.
Technical specifications:
| Degrees of freedom | 6 rotating joints |
| Payload | 5 kg / 11 lbs |
| Repeatability | ±0.03 mm, with payload, per ISO 9283 |
| Weight with cable | 20.6 kg / 45.4 lbs |
| Reach | 850 mm / 33.5 in |
| Motion Range | Base: ± 360°, Shoulder: ± 360°, Elbow: ± 360°,
Wrist 1: ± 360°, Wrist 2: ± 360°, Wrist 3: Infinite |
| Maximum Speed | Base: ± 180°/Sec, Shoulder: ± 180°/Sec,
Elbow: ± 180°/Sec, Wrist 1: ± 360°/Sec, Wrist 2: ± 360°/Sec, Wrist 3: ± 360°/Sec |
Applications in the laboratory:
It is used to give the mobile robotic platforms the possibility to grasp and move objects in the working environment.
Controllers
Description of the device:

The Brunner CLS-E Active Force Feedback Joystick finds perfect application for applic
ations where a modern stick solution is used for system control. It provides excellent quality, highest fidelity and unique durability. at an unmatched price-performance level.
Technical specifications:
| Degrees of freedom | 2 |
| Brunner Drop-In: | fully integrated, with built-in control unit and 36VDC power inlet (ext. power supply included) |
| Motors | Long life brushless DC technology |
| Feedback Technology | Contactless high-resolution position feedback |
| Cooling | Passive cooling with no fan, so very quiet and efficient |
| Support | X-Plane, FSX, FSX Steam edition, Prepare-3D with Brunner CLS2SIM SW, X-Plane Plugin for Windows, Linux |
Applications in the laboratory:
Together with the mobile robotic platforms, it is used for the remote control of field robotic applications.
Description of the device:

Jetson TX2 is the fastest, most power-efficient embedded AI computing device. This supercomputer on a module brings true AI computing at the edge. It’s built around an NVIDIA Pascal™-family GPU and features a variety of standard hardware interfaces that make it easy to integrate it into a wide range of products and form factors.
Technical specifications:
| GPU | 256-core NVIDIA Pascal™ GPU architecture with 256 NVIDIA CUDA cores |
| CPU | Dual-Core NVIDIA Denver 2 64-Bit CPU Quad-Core ARM® Cortex®-A57 MPCore |
| RAM | 8GB 128-bit LPDDR4 Memory 1866 MHx – 59.7 GB/s |
| Storage | 32GB eMMC 5.1 |
| Power | 7.5 W |
| Wi-fi | Yes |
Applications in the laboratory:
It is used as computing centre and controller for robotic applications as well as applied research applications.
Manufacturing and Prototyping


Sensors




Vision Systems


Uncrewed Ground Vehicle Prototypes
