Roboter und Ausrüstung


Das Labor ist mit modernsten Feldrobotersystemen, Sensoren für die Wahrnehmung und Kartierung im Außenbereich sowie mechatronischen und eingebetteten Systemen für die Entwicklung angewandter Forschungsaktivitäten und Prototypen ausgestattet.
Mobile Plattformen


Beschreibung des Geräts:

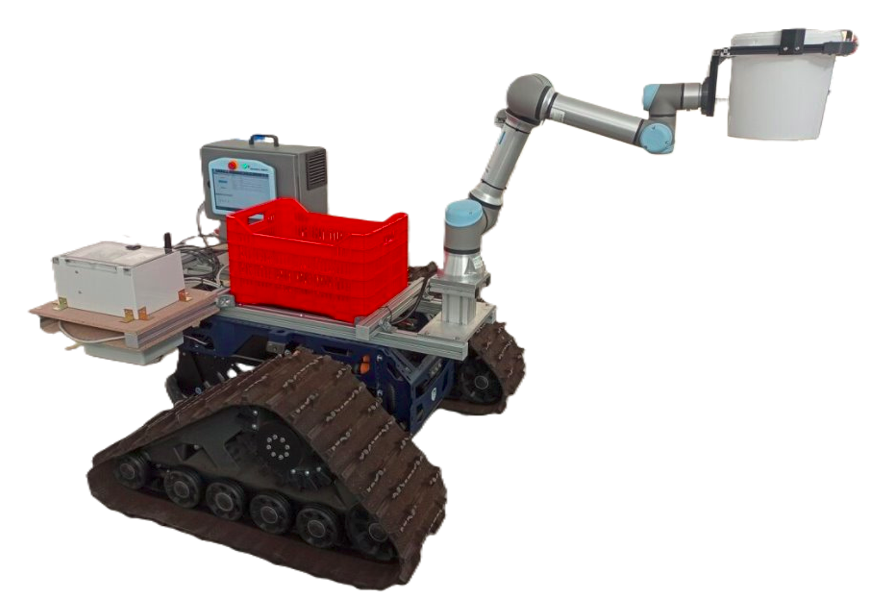
Husky ist eine mittelgroße Roboterentwicklungsplattform. Sie verfügt über eine große Nutzlastkapazität und einen Antriebsstrang mit hohem Drehmoment.
Technische Daten:
| Abmessungen (außen) | 990 x 670 x 390 mm |
| Abmessungen (innen) | 296 x 411 x 155 mm |
| Eigengewicht | 50 kg |
| Maximale Nutzlast | 75 kg |
| Treiber und APIs | ROS, C++ Library, MathWorks |
Anwendungen im Labor:
Es wird als Mehrzweckplattform für die Entwicklung von Feldroboteranwendungen sowie für angewandte Forschungsanwendungen verwendet, z. B. Wahrnehmung, proximale Sensorik, Greifen, Manipulation usw.

Robotermanipulatoren
Beschreibung des Geräts:

Der UR3e ist der kleinste kollaborative Roboter der Universal Robots-Familie. Er eignet sich ideal für die Automatisierung leichter Montageaufgaben und Szenarien, in denen die Nutzlast nicht besonders hoch ist (3 kg Nutzlast bei einem Gewicht von nur 11 kg), dank einer Drehung um ±360 Grad an allen Handgelenksgelenken und einer unbegrenzten Drehung am Endgelenk.
Technische Daten:
| Freiheitsgrade | 6 rotating joints |
| Nutzlast | 3 kg / 6.6 lbs |
| Wiederholbarkeit | ±0.03 mm, with payload, per ISO 9283 |
| Gewicht | 11 kg / 24.3 lbs |
| Reichweite | 500 mm / 19.7 in |
| Bewegungsbereich | Base: ± 360°, Shoulder: ± 360°, Elbow: ± 360°,
Wrist 1: ± 360°, Wrist 2: ± 360°, Wrist 3: Infinite |
| Höchstgeschwindigkeit | Base: ± 180°/Sec, Shoulder: ± 180°/Sec,
Elbow: ± 180°/Sec, Wrist 1: ± 360°/Sec, Wrist 2: ± 360°/Sec, Wrist 3: ± 360°/Sec |
Anwendungen im Labor:
Es wird verwendet, um mobilen Roboterplattformen die Möglichkeit zu geben, Objekte in der Arbeitsumgebung zu greifen und zu bewegen sowie bildverarbeitungsbasierte Handhabungs- und Manipulationsanwendungen zu testen.
Beschreibung des Geräts:
Der UR5e ist das mittelgroße Mitglied der Universal Robots-Familie. Mit einer Traglast von 5 kg und einem Reichweitenradius von 850 mm eignet er sich ideal für die Automatisierung von Bearbeitungsaufgaben mit geringem Gewicht.
Technische Daten:
| Freiheitsgrade | 6 rotating joints |
| Nutzlast | 5 kg / 11 lbs |
| Wiederholbarkeit | ±0.03 mm, with payload, per ISO 9283 |
| Gewicht mit Kabel | 20.6 kg / 45.4 lbs |
| Reichweite | 850 mm / 33.5 in |
| Bewegungsbereich | Base: ± 360°, Shoulder: ± 360°, Elbow: ± 360°,
Wrist 1: ± 360°, Wrist 2: ± 360°, Wrist 3: Infinite |
| Höchstgeschwindigkeit | Base: ± 180°/Sec, Shoulder: ± 180°/Sec,
Elbow: ± 180°/Sec, Wrist 1: ± 360°/Sec, Wrist 2: ± 360°/Sec, Wrist 3: ± 360°/Sec |
Anwendungen im Labor:
Es wird verwendet, um mobilen Roboterplattformen die Möglichkeit zu geben, Objekte in der Arbeitsumgebung zu greifen und zu bewegen.
Steuerungen
Beschreibung des Geräts:

Der Brunner CLS-E Active Force Feedback Joystick eignet sich perfekt für Anwendungen,
bei denen eine moderne Stick-Lösung zur Systemsteuerung eingesetzt wird. Er bietet hervorragende Qualität, höchste Wiedergabetreue und einzigartige Langlebigkeit zu einem unübertroffenen Preis-Leistungs-Verhältnis.
.
Technische Daten:
| Freiheitsgrade | 2 |
| Brunner Drop-In: | vollständig integriert, mit eingebauter Steuereinheit und 36-VDC-Stromeingang (externes Netzteil im Lieferumfang enthalten) |
| Motoren | Langlebige bürstenlose Gleichstromtechnologie |
| Feedback-Technologie | Kontaktlose hochauflösende Positionsrückmeldung |
| Kühlung | Passive Kühlung ohne Lüfter, daher sehr leise und effizient |
| Unterstützung | X-Plane, FSX, FSX Steam Edition, Prepare-3D mit Brunner CLS2SIM SW, X-Plane-Plugin für Windows, Linux |
Anwendungen im Labor:
Zusammen mit den mobilen Roboterplattformen wird es zur Fernsteuerung von Roboteranwendungen im Feld eingesetzt.
Beschreibung des Geräts:

Jetson TX2 ist das schnellste und energieeffizienteste eingebettete KI-Computing-Gerät. Dieser Supercomputer auf einem Modul bringt echtes KI-Computing an den Rand des Netzwerks. Er basiert auf einer GPU der NVIDIA Pascal™-Familie und verfügt über eine Vielzahl von Standard-Hardware-Schnittstellen, die eine einfache Integration in eine Vielzahl von Produkten und Formfaktoren ermöglichen.
Technische Daten:
| GPU | 256-core NVIDIA Pascal™ GPU architecture with 256 NVIDIA CUDA cores |
| CPU | Dual-Core NVIDIA Denver 2 64-Bit CPU Quad-Core ARM® Cortex®-A57 MPCore |
| RAM | 8GB 128-bit LPDDR4 Memory 1866 MHx – 59.7 GB/s |
| Lagerung | 32GB eMMC 5.1 |
| Leistung | 7.5 W |
| Wi-fi | Yes |
Anwendungen im Labor:
Es wird als Rechenzentrum und Steuerung für Roboteranwendungen sowie für angewandte Forschungsanwendungen eingesetzt.
Fertigung und Prototypenbau


Sensoren



Bildverarbeitungssysteme


Prototypen unbemannter Bodenfahrzeuge
