Student Projects
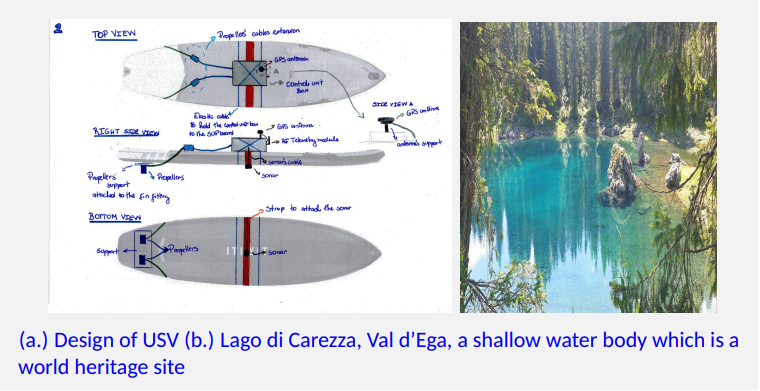
Project Title: Unmanned surface vessel for surveying shallow inland water
Student Name: Fernanda Dalla Vecchia Gueter
Year: 2019-2020
Motivation/Background Approach
• Water shortages due to and loss of aquatic biodiversity due to rapidly changing weather conditions & global warming
• Design an uncrewed surface vehicle to perform a survey of water depth to fill this gap
• Vessel that is cost beneficial, lightweight, and easy to transport and assemble while still having necessary attributes
• A stand-up water board is the body of the vessel.
Project Title: Development and testing of a mechatronic system and a ROS-based controller for a tracked off-road UGV
Student Name: Galli Davide
Year: 2022-2023
Motivation/Background Approach
Agroforestry 3.0 is increasingly relying of agroforestry on robots to perform repetitive task like, since robots are able to overcome critical human constraints.
The aim it to develop from scratch the interface between the Mattro ROVO 2, a radio-controlled mobile platform, and the Nvida Jetson TX2, a broadly used developing platform, to obtain a system capable of driving around autonomously given some inputs.

Project Title: Development of a path planning algorithm for a trimming robot
Student Name: Manzardo Matteo
Year: 2022-2023

Motivation/Background Approach
Nowadays, the operation of trimming an artistic bush is performed manually by skilled operators. The goal of the project is to automatize this operation by exploiting a robotic manipulator. In particular, in this project a method has been developed which automatically generates a path capable of cutting the bush in the shortest possible time and by performing an effective cut (precise and complete, i.e. every part of the bush is trimmed).
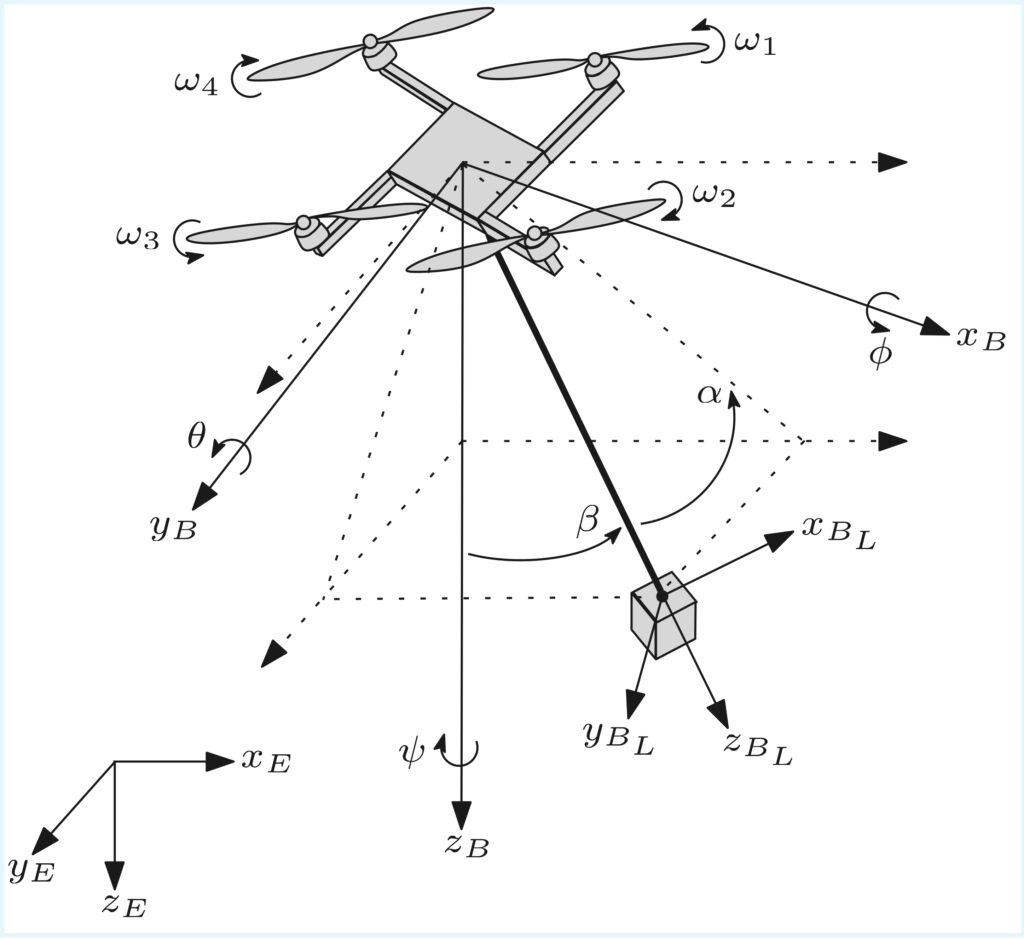
Project Title: Robust and safe control of aerial cargo drones
Student Name: Sara Gomiero
Year: 2023-2026
Motivation/Background Approach
• Drones with cable-suspended payloads are revolutionizing social and economic sectors, in particular transportation and delivery
• Cargo quadrotors are strongly underactuated and subject to both external disturbances and load oscillations
• Commercial drones are usually embedded with PID controllers, but robust controllers are required for the safe inclusion of cargo quadrotors in the environment
• Robust controllers based on sliding mode and adaptive techniques are investigated to solve the trajectory tracking problem
• Robust observers are designed to estimate the disturbances and the states of the cargo drone
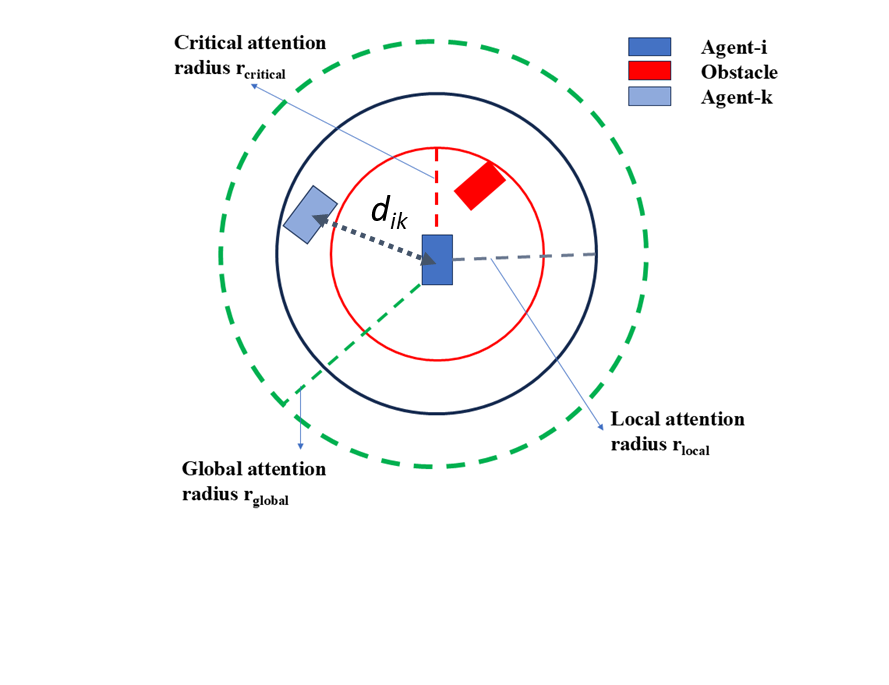
Project Title: Multi robot trajectory optimization using opinion dynamics
Student Name: B Sai Bhaskar Varma
Year: 2023-2026
Motivation/Background Approach
• To formulate a decentralized control law for trajectory optimization of multi agent systems (MAS) in an uncertain/dynamic environment, by using cooperative feedback.
• Collective decision making is critical in multi robot systems (MRS) to avoid deadlocks and collisions.
• To model the interplay/influence between one agent’s decision on others, which is challenging but crucial in decision making.